
Derivative
Did you know...
SOS Children has tried to make Wikipedia content more accessible by this schools selection. All children available for child sponsorship from SOS Children are looked after in a family home by the charity. Read more...

In calculus, a branch of mathematics, the derivative is a measurement of how a function changes when the values of its inputs change. Loosely speaking, a derivative can be thought of as how much a quantity is changing at some given point. For example, the derivative of the position or distance of a car at some point in time is the instantaneous velocity, or instantaneous speed (respectively), at which that car is traveling (conversely the integral of the velocity is the car's position).
A closely-related notion is the differential of a function.
The derivative of a function at a chosen input value describes the best linear approximation of the function near that input value. For a real-valued function of a single real variable, the derivative at a point equals the slope of the tangent line to the graph of the function at that point. In higher dimensions, the derivative of a function at a point is a linear transformation called the linearization..
The process of finding a derivative is called differentiation. The fundamental theorem of calculus states that differentiation is the reverse process to integration.
Differentiation and the derivative

Differentiation is a method to compute the rate at which a quantity, y, changes with respect to the change in another quantity, x, upon which it is dependent. This rate of change is called the derivative of y with respect to x. In more precise language, the dependency of y on x means that y is a function of x. If x and y are real numbers, and if the graph of y is plotted against x, the derivative measures the slope of this graph at each point. This functional relationship is often denoted y = f(x), where f denotes the function.
The simplest case is when y is a linear function of x, meaning that the graph of y against x is a straight line. In this case, y = f(x) = m x + c, for real numbers m and c, and the slope m is given by
where the symbol Δ (the uppercase form of the Greek letter Delta) is an abbreviation for "change in." This formula is true because
- y + Δy = f(x+ Δx) = m (x + Δx) + c = m x + c + m Δx = y + mΔx.
It follows that Δy = m Δx.
This gives an exact value for the slope of a straight line. If the function f is not linear (i.e. its graph is not a straight line), however, then the change in y divided by the change in x varies: differentiation is a method to find an exact value for this rate of change at any given value of x.



The idea, illustrated by Figures 1-3, is to compute the rate of change as the limiting value of the ratio of the differences Δy / Δx as Δx becomes infinitely small.
In Leibniz's notation, such an infinitesimal change in x is denoted by dx, and the derivative of y with respect to x is written

suggesting the ratio of two infinitesimal quantities. (The above expression is pronounced in various ways such as "d y by d x" or "d y over d x". The oral form "d y d x" is often used conversationally, although it may lead to confusion.)
The most common approach to turn this intuitive idea into a precise definition uses limits, but there are other methods, such as non-standard analysis.
Definition via difference quotients
Let y=f(x) be a function of x. In classical geometry, the tangent line at a real number a was the unique line through the point (a, f(a)) which did not meet the graph of f transversally, meaning that the line did not pass straight through the graph. The derivative of y with respect to x at a is, geometrically, the slope of the tangent line to the graph of f at a. The slope of the tangent line is very close to the slope of the line through (a, f(a)) and a nearby point on the graph, for example (a + h, f(a + h)). These lines are called secant lines. A value of h close to zero will give a good approximation to the slope of the tangent line, and smaller values (in absolute value) of h will, in general, give better approximations. The slope of the secant line is the difference between the y values of these points divided by the difference between the x values, that is,
This expression is Newton's difference quotient. The derivative is the value of the difference quotient as the secant lines get closer and closer to the tangent line. Formally, the derivative of the function f at a is the limit

of the difference quotient as h approaches zero, if this limit exists. If the limit exists, then f is differentiable at a. Here f′ (a) is one of several common notations for the derivative (see below).
Equivalently, the derivative satisfies the property that

which has the intuitive interpretation (see Figure 1) that the tangent line to f at a gives the best linear approximation

to f near a (i.e., for small h). This interpretation is the easiest to generalize to other settings (see below).
Substituting 0 for h in the difference quotient causes division by zero, so the slope of the tangent line cannot be found directly. Instead, define Q(h) to be the difference quotient as a function of h:
 .
.
Q(h) is the slope of the secant line between (a, f(a)) and (a + h, f(a + h)). If f is a continuous function, meaning that its graph is an unbroken curve with no gaps, then Q is a continuous function away from the point h = 0. If the limit  exists, meaning that there is a way of choosing a value for Q(0) which makes the graph of Q a continuous function, then the function f is differentiable at the point a, and its derivative at a equals Q(0).
exists, meaning that there is a way of choosing a value for Q(0) which makes the graph of Q a continuous function, then the function f is differentiable at the point a, and its derivative at a equals Q(0).
In practice, the continuity of the difference quotient Q(h) at h = 0 is shown by modifying the numerator to cancel h in the denominator. This process can be long and tedious for complicated functions, and many short cuts are commonly used to simplify the process.
Example
The squaring function f(x) = x² is differentiable at x = 3, and its derivative there is 6. This is proven by writing the difference quotient as follows:

Then we get the simplified function in the limit:

The last expression shows that the difference quotient equals 6 + h when h is not zero and is undefined when h is zero. (Remember that because of the definition of the difference quotient, the difference quotient is always undefined when h is zero.) However, there is a natural way of filling in a value for the difference quotient at zero, namely 6. Hence the slope of the graph of the squaring function at the point (3, 9) is 6, and so its derivative at x = 3 is f '(3) = 6.
More generally, a similar computation shows that the derivative of the squaring function at x = a is f '(a) = 2a.
Continuity and differentiability

If y = f(x) is differentiable at a, then f must also be continuous at a. As an example, choose a point a and let f be the step function which returns a value, say 1, for all x less than a, and returns a different value, say 10, for all x greater than or equal to a. f cannot have a derivative at a. If h is negative, then a + h is on the low part of the step, so the secant line from a to a + h will be very steep, and as h tends to zero the slope tends to infinity. If h is positive, then a + h is on the high part of the step, so the secant line from a to a + h will have slope zero. Consequently the secant lines do not approach any single slope, so the limit of the difference quotient does not exist.

However, even if a function is continuous at a point, it may not be differentiable there. For example, the absolute value function y = |x| is continuous at x = 0, but it is not differentiable there. If h is positive, then the slope of the secant line from 0 to h is one, whereas if h is negative, then the slope of the secant line from 0 to h is negative one. This can be seen graphically as a "kink" in the graph at x = 0. Even a function with a smooth graph is not differentiable at a point where its tangent is vertical: For instance, the function y = 3√x is not differentiable at x = 0.
Most functions which occur in practice have derivatives at all points or at almost every point. However, a result of Stefan Banach states that the set of functions which have a derivative at some point is a meager set in the space of all continuous functions. Informally, this means that differentiable functions are very atypical among continuous functions. The first known example of a function that is continuous everywhere but differentiable nowhere is the Weierstrass function.
The derivative as a function
Let f be a function that has a derivative at every point a in the domain of f. Because every point a has a derivative, there is a function which sends the point a to the derivative of f at a. This function is written f′(x) and is called the derivative function or the derivative of f. The derivative of f collects all the derivatives of f at all the points in the domain of f.
Sometimes f has a derivative at most, but not all, points of its domain. The function whose value at a equals f′(a) whenever f′(a) is defined and is undefined elsewhere is also called the derivative of f. It is still a function, but its domain is strictly smaller than the domain of f.
Using this idea, differentiation becomes a function of functions: The derivative is an operator whose domain is the set of all functions which have derivatives at every point of their domain and whose range is a set of functions. If we denote this operator by D, then D(f) is the function f′(x). Since D(f) is a function, it can be evaluated at a point a. By the definition of the derivative function, D(f)(a) = f′(a).
For comparison, consider the doubling function f(x) =2x; f is a real-valued function of a real number, meaning that it takes numbers as inputs and has numbers as outputs:

The operator D, however, is not defined on individual numbers. It is only defined on functions:
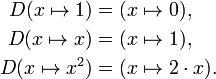
Because the output of D is a function, the output of D can be evaluated at a point. For instance, when D is applied to the squaring function,

D outputs the doubling function,

which we named f(x). This output function can then be evaluated to get f(1) = 2, f(2) = 4, and so on.
Higher derivatives
Let f be a differentiable function, and let f′(x) be its derivative. The derivative of f′(x) (if it has one) is written f′′(x) and is called the second derivative of f. Similarly, the derivative of a second derivative, if it exists, is written f′′′(x) and is called the third derivative of f. These repeated derivatives are called higher-order derivatives.
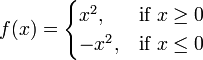
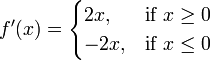
A function f need not have a derivative, for example, if it is not continuous. Similarly, even if f does have a derivative, it may not have a second derivative. For example, let
 .
.
An elementary calculation shows that f is a differentiable function whose derivative is
 .
.
f′(x) is twice the absolute value function, and it does not have a derivative at zero. Similar examples show that a function can have k derivatives for any non-negative integer k but no (k + 1)-order derivative. A function that has k successive derivatives is called k times differentiable. If in addition the kth derivative is continuous, then the function is said to be of differentiability class Ck. (This is a stronger condition than having k derivatives. For an example, see differentiability class.) A function that has infinitely many derivatives is called infinitely differentiable or smooth.
On the real line, every polynomial function is infinitely differentiable. By standard differentiation rules, if a polynomial of degree n is differentiated n times, then it becomes a constant function. All of its subsequent derivatives are identically zero. In particular, they exist, so polynomials are smooth functions.
The derivatives of a function f at a point x provide polynomial approximations to that function near x. For example, if f is twice differentiable, then

in the sense that

If f is infinitely differentiable, then this is the beginning of the Taylor series for f.
Notations for differentiation
Leibniz's notation
The notation for derivatives introduced by Gottfried Leibniz is one of the earliest. It is still commonly used when the equation y=f(x) is viewed as a functional relationship between dependent and independent variables. Then the first derivative is denoted by

Higher derivatives are expressed using the notation

for the nth derivative of y = f(x) (with respect to x).
With Leibniz's notation, we can write the derivative of y at the point x = a in two different ways:
Leibniz's notation allows one to specify the variable for differentiation (in the denominator). This is especially relevant for partial differentiation. It also makes the chain rule easy to remember:
Lagrange's notation
One of the most common modern notations for differentiation is due to Joseph Louis Lagrange and uses the prime mark, so that the derivative of a function f(x) is denoted f′(x) or simply f′. Similarly, the second and third derivatives are denoted
 and
and 
Beyond this point, some authors use Roman numerals such as

for the fourth derivative, whereas other authors place the number of derivatives in parentheses:

The latter notation generalizes to yield the notation f (n) for the nth derivative of f — this notation is most useful when we wish to talk about the derivative as being a function itself, as in this case the Leibniz notation can become cumbersome.
Newton's notation
Newton's notation for differentiation, also called the dot notation, places a dot over the function name to represent a derivative. If y = f(t), then
 and
and 
denote, respectively, the first and second derivatives of y with respect to t. This notation is used almost exclusively for time derivatives, meaning that the independent variable of the function represents time. It is very common in physics and in mathematical disciplines connected with physics such as differential equations. While the notation becomes unmanageable for high-order derivatives, in practice only very few derivatives are needed.
Euler's notation
Euler's notation uses a differential operator D, which is applied to a function f to give the first derivative Df. The second derivative is denoted D2f, and the nth derivative is denoted Dnf.
If y = f(x) is a dependent variable, then often the subscript x is attached to the D to clarify the independent variable x. Euler's notation is then written
 or
or  ,
,
although this subscript is often omitted when the variable x is understood, for instance when this is the only variable present in the expression.
Euler's notation is useful for stating and solving linear differential equations.
Computing the derivative
The derivative of a function can, in principle, be computed from the definition by considering the difference quotient, and computing its limit. For some examples, see Derivative (examples). In practice, once the derivatives of a few simple functions are known, the derivatives of other functions are more easily computed using rules for obtaining derivatives of more complicated functions from simpler ones.
Derivatives of elementary functions
In addition, the derivatives of some common functions are useful to know.
- Derivatives of powers: if
 ,
,
where r is any real number, then
 ,
,
wherever this function is defined. For example, if r = 1/2, then
 .
.
and the function is defined only for non-negative x. When r = 0, this rule recovers the constant rule.
- Exponential and logarithm functions:


- Inverse trigonometric functions:
Rules for finding the derivative
In many cases, complicated limit calculations by direct application of Newton's difference quotient can be avoided using differentiation rules. Some of the most basic rules are the following.
- Constant rule: if f(x) is constant, then

- Sum rule:
 for all functions f and g and all real numbers a and b.
for all functions f and g and all real numbers a and b.
- Product rule:
 for all functions f and g.
for all functions f and g.
- Quotient rule:
- Chain rule: If
 , then
, then
 .
.
Example computation
The derivative of

is

Here the second term was computed using the chain rule and third using the product rule: the known derivatives of the elementary functions x², x4, sin(x), ln(x) and exp(x) = ex were also used.
Derivatives in higher dimensions
Derivatives of vector valued functions
A vector-valued function y(t) of a real variable is a function which sends real numbers to vectors in some vector space Rn. A vector-valued function can be split up into its coordinate functions y1(t), y2(t), …, yn(t), meaning that y(t) = (y1(t), ..., yn(t)). This includes, for example, parametric curves in R2 or R3. The coordinate functions are real valued functions, so the above definition of derivative applies to them. The derivative of y(t) is defined to be the vector, called the tangent vector, whose coordinates are the derivatives of the coordinate functions. That is,

Equivalently,

if the limit exists. The subtraction in the numerator is subtraction of vectors, not scalars. If the derivative of y exists for every value of t, then y′ is another vector valued function.
If e1, …, en is the standard basis for Rn, then y(t) can also be written as y1(t)e1 + … + yn(t)en. If we assume that the derivative of a vector-valued function retains the linearity property, then the derivative of y(t) must be

because each of the basis vectors is a constant.
This generalization is useful, for example, if y(t) is the position vector of a particle at time t; then the derivative y′(t) is the velocity vector of the particle at time t.
Partial derivatives
Suppose that f is a function that depends on more than one variable. For instance,

f can be reinterpreted as a family of functions of one variable indexed by the other variables:

In other words, every value of x chooses a function, denoted fx, which is a function of one real number. That is,


Once a value of x is chosen, say a, then f(x,y) determines a function fa which sends y to a² + ay + y²:

In this expression, a is a constant, not a variable, so fa is a function of only one real variable. Consequently the definition of the derivative for a function of one variable applies:

The above procedure can be performed for any choice of a. Assembling the derivatives together into a function gives a function which describes the variation of f in the y direction:
This is the partial derivative of f with respect to y. Here ∂ is a rounded d called the partial derivative symbol. To distinguish it from the letter d, ∂ is sometimes pronounced "der", "del", or "partial" instead of "dee".
In general, the partial derivative of a function f(x1, …, xn) in the direction xi at the point (a1 …, an) is defined to be:

In the above difference quotient, all the variables except xi are held fixed. That choice of fixed values determines a function of one variable

and, by definition,

In other words, the different choices of a index a family of one-variable functions just as in the example above. This expression also shows that the computation of partial derivatives reduces to the computation of one-variable derivatives.
An important example of a function of several variables is the case of a scalar-valued function f(x1,...xn) on a domain in Euclidean space Rn (e.g., on R² or R³). In this case f has a partial derivative ∂f/∂xj with respect to each variable xj. At the point a, these partial derivatives define the vector

This vector is called the gradient of f at a. If f is differentiable at every point in some domain, then the gradient is a vector-valued function ∇f which takes the point a to the vector ∇f(a). Consequently the gradient determines a vector field.
Directional derivatives
If f is a real-valued function on Rn, then the partial derivatives of f measure its variation in the direction of the coordinate axes. For example, if f is a function of x and y, then its partial derivatives measure the variation in f in the x direction and the y direction. They do not, however, directly measure the variation of f in any other direction, such as along the diagonal line y = x. These are measured using directional derivatives. Choose a vector

The directional derivative of f in the direction of v at the point x is the limit

Let λ be a scalar. The substitution of h/λ for h changes the λv direction's difference quotient into λ times the v direction's difference quotient. Consequently, the directional derivative in the λv direction is λ times the directional derivative in the v direction. Because of this, directional derivatives are often considered only for unit vectors v.
If all the partial derivatives of f exist and are continuous at x, then they determine the directional derivative of f in the direction v by the formula:
This is a consequence of the definition of the total derivative. It follows that the directional derivative is linear in v.
The same definition also works when f is a function with values in Rm. We just use the above definition in each component of the vectors. In this case, the directional derivative is a vector in Rm.
The total derivative, the total differential and the Jacobian
Let f be a function from a domain in R to R. The derivative of f at a point a in its domain is the best linear approximation to f at that point. As above, this is a number. Geometrically, if v is a unit vector starting at a, then f′ (a) , the best linear approximation to f at a, should be the length of the vector found by moving v to the target space using f. (This vector is called the pushforward of v by f and is usually written  .) In other words, if v is measured in terms of distances on the target, then, because v can only be measured through f, v no longer appears to be a unit vector because f does not preserve unit vectors. Instead v appears to have length f′ (a). If m is greater than one, then by writing f using coordinate functions, the length of v in each of the coordinate directions can be measured separately.
.) In other words, if v is measured in terms of distances on the target, then, because v can only be measured through f, v no longer appears to be a unit vector because f does not preserve unit vectors. Instead v appears to have length f′ (a). If m is greater than one, then by writing f using coordinate functions, the length of v in each of the coordinate directions can be measured separately.
Suppose now that f is a function from a domain in Rn to Rm and that a is a point in the domain of f. The derivative of f at a should still be the best linear approximation to f at a. In other words, if v is a vector on Rn, then f′ (a) should be the linear transformation that best approximates f. The linear transformation should contain all the information about how f transforms vectors at a to vectors at f(a), and in symbols, this means it should be the linear transformation f′ (a) such that

Here h is a vector in Rn, so the norm in the denominator is the standard length on Rn. However, f′ (a)h is a vector in Rm, and the norm in the numerator is the standard length on Rm. The linear transformation f′ (a), if it exists, is called the total derivative of f at a or the (total) differential of f at a.
If the total derivative exists at a, then all the partial derivatives of f exist at a. If we write f using coordinate functions, so that f = (f1, f2, ..., fm), then the total derivative can be expressed as a matrix called the Jacobian matrix of f at a:
The existence of the Jacobian is strictly stronger than existence of all the partial derivatives, but if the partial derivatives exist and satisfy mild smoothness conditions, then the total derivative exists and is given by the Jacobian.
The definition of the total derivative subsumes the definition of the derivative in one variable. In this case, the total derivative exists if and only if the usual derivative exists. The Jacobian matrix reduces to a 1×1 matrix whose only entry is the derivative f′ (x). This 1×1 matrix satisfies the property that f(a + h) − f(a) − f′(a)h is approximately zero, in other words that

Up to changing variables, this is the statement that the function  is the best linear approximation to f at a.
is the best linear approximation to f at a.
The total derivative of a function does not give another function in the same way that one-variable case. This is because the total derivative of a multivariable function has to record much more information than the derivative of a single-variable function. Instead, the total derivative gives a function from the tangent bundle of the source to the tangent bundle of the target.
Generalizations
The concept of a derivative can be extended to many other settings. The common thread is that the derivative of a function at a point serves as a linear approximation of the function at that point.
- An important generalization of the derivative concerns complex functions of complex variables, such as functions from (a domain in) the complex numbers C to C. The notion of the derivative of such a function is obtained by replacing real variables with complex variables in the definition. However, this innocent definition hides some very deep properties. If C is identified with R² by writing a complex number z as x + i y, then a differentiable function from C to C is certainly differentiable as a function from R² to R² (in the sense that its partial derivatives all exist), but the converse is not true in general: the complex derivative only exists if the real derivative is complex linear and this imposes relations between the partial derivatives called the Cauchy Riemann equations — see holomorphic functions.
- Another generalization concerns functions between differentiable or smooth manifolds. Intuitively speaking such a manifold M is a space which can be approximated near each point x by a vector space called its tangent space: the prototypical example is a smooth surface in R³. The derivative (or differential) of a (differentiable) map f: M → N between manifolds, at a point x in M, is then a linear map from the tangent space of M at x to the tangent space of N at f(x). The derivative function becomes a map between the tangent bundles of M and N. This definition is fundamental in differential geometry and has many uses — see pushforward (differential) and pullback (differential geometry).
- Differentiation can also be defined for maps between infinite dimensional vector spaces such as Banach spaces and Fréchet spaces. There is a generalization both of the directional derivative, called the Gâteaux derivative, and of the differential, called the Fréchet derivative.
- One deficiency of the classical derivative is that not very many functions are differentiable. Nevertheless, there is a way of extending the notion of the derivative so that all continuous functions and many other functions can be differentiated using a concept known as the weak derivative. The idea is to embed the continuous functions in a larger space called the space of distributions and only require that a function is differentiable "on average".
- The properties of the derivative have inspired the introduction and study of many similar objects in algebra and topology — see, for example, differential algebra.