
Conic section
Did you know...
This content from Wikipedia has been selected by SOS Children for suitability in schools around the world. All children available for child sponsorship from SOS Children are looked after in a family home by the charity. Read more...
| Wikibooks has a book on the topic of: Conic sections |


In mathematics, a conic section (or just conic) is a curve that can be formed by intersecting a cone (more precisely, a right circular conical surface) with a plane. The conic sections were named and studied as long ago as 200 BC, when Apollonius of Perga undertook a systematic study of their properties.
Types of conics
The five types of conics are the circle, hyperbola, ellipse, parabola, and rectangular hyperbola. The circle and the ellipse arise when the intersection of cone and plane is a closed curve. The circle is a special case of the ellipse in which the plane is perpendicular to the axis of the cone. If the plane is parallel to a generator line of the cone, the conic is called a parabola. Finally, if the intersection is an open curve and the plane is not parallel to generator lines of the cone, the figure is a hyperbola. (In this case the plane will intersect both halves of the cone, producing two separate curves, though often one is ignored.)
Degenerate cases
There are multiple degenerate cases, in which the plane passes through the apex of the cone. The intersection in these cases can be a straight line (when the plane is tangential to the surface of the cone); a point (when the angle between the plane and the axis of the cone is larger than this); or a pair of intersecting lines (when the angle is smaller). There is also a degenerate where the cone is a cylinder (the vertex is at infinity) which can produce two parallel lines.
Eccentricity

The four defining conditions above can be combined into one condition that depends on a fixed point F (the focus), a line L (the directrix) not containing F and a nonnegative real number e (the eccentricity). The corresponding conic section consists of all points whose distance to F equals e times their distance to L. For 0 < e < 1 we obtain an ellipse, for e = 1 a parabola, and for e > 1 a hyperbola.
For an ellipse and a hyperbola, two focus-directrix combinations can be taken, each giving the same full ellipse or hyperbola. The distance from the centre to the directrix is  , where
, where  is the semi-major axis of the ellipse, or the distance from the center to the tops of the hyperbola. The distance from the centre to a focus is
is the semi-major axis of the ellipse, or the distance from the center to the tops of the hyperbola. The distance from the centre to a focus is  .
.
In the case of a circle, the eccentricity e = 0, and one can imagine the directrix to be infinitely far removed from the centre. However, the statement that the circle consists of all points whose distance is e times the distance to L is not useful, because we get zero times infinity.
The eccentricity of a conic section is thus a measure of how far it deviates from being circular.
For a given , the closer  is to 1, the smaller is the semi-minor axis.
is to 1, the smaller is the semi-minor axis.
Cartesian coordinates
In the Cartesian coordinate system, the graph of a quadratic equation in two variables is always a conic section, and all conic sections arise in this way. The equation will be of the form
 with
with  ,
,  ,
,  not all zero.
not all zero.
then:
- if
 , the equation represents an ellipse (unless the conic is degenerate, for example
, the equation represents an ellipse (unless the conic is degenerate, for example  );
); - if
 and
and  , the equation represents a circle;
, the equation represents a circle;
- if
- if
 , the equation represents a parabola;
, the equation represents a parabola; - if
 , the equation represents a hyperbola;
, the equation represents a hyperbola; - if we also have
 , the equation represents a rectangular hyperbola.
, the equation represents a rectangular hyperbola.
- if we also have
Note that A and B are just polynomial coefficients, not the lengths of semi-major/minor axis as defined in the previous sections.
Through change of coordinates these equations can be put in standard forms:
- Circle:
- Ellipse:
 ,
, 
- Parabola:

- Hyperbola:
 ,
, 
- Rectangular Hyperbola:

Such forms will be symmetrical about the x-axis and for the circle, ellipse and hyperbola symmetrical about the y-axis.
The rectangular hyperbola however is only symmetrical about the lines  and
and  . Therefore its inverse function is exactly the same as its original function.
. Therefore its inverse function is exactly the same as its original function.
These standard forms can be written as parametric equations,
- Circle:
 ,
, - Ellipse:
 ,
, - Parabola:
 ,
, - Hyperbola:
 or
or  .
. - Rectangular Hyperbola:

Homogeneous coordinates
In homogeneous coordinates a conic section can be represented as:

Or in matrix notation
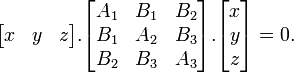
The matrix  is called the matrix of the conic section.
is called the matrix of the conic section.
 is called the determinant of the conic section. If Δ = 0 then the conic section is said to be degenerate, this means that the conic section is in fact a union of two straight lines. A conic section that intersects itself is always degenerate, however not all degenerate conic sections intersect themselves, if they do not they are straight lines.
is called the determinant of the conic section. If Δ = 0 then the conic section is said to be degenerate, this means that the conic section is in fact a union of two straight lines. A conic section that intersects itself is always degenerate, however not all degenerate conic sections intersect themselves, if they do not they are straight lines.
For example, the conic section 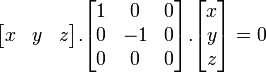 reduces to the union of two lines:
reduces to the union of two lines:
 .
.
Similarly, a conic section sometimes reduces to a (single) line:
 .
.
 is called the discriminant of the conic section. If δ = 0 then the conic section is a parabola, if δ<0, it is an hyperbola and if δ>0, it is an ellipse. A conic section is a circle if δ>0 and A1 = A2, it is an rectangular hyperbola if δ<0 and A1 = -A2. It can be proven that in the complex projective plane CP2 two conic sections have four points in common (if one accounts for multiplicity), so there are never more than 4 intersection points and there is always 1 intersection point (possibilities: 4 distinct intersection points, 2 singular intersection points and 1 double intersection points, 2 double intersection points, 1 singular intersection point and 1 with multiplicity 3, 1 intersection point with multiplicity 4). If there exists at least one intersection point with multiplicity > 1, then the two conic sections are said to be tangent. If there is only one intersection point, which has multiplicity 4, the two conic sections are said to be osculating.
is called the discriminant of the conic section. If δ = 0 then the conic section is a parabola, if δ<0, it is an hyperbola and if δ>0, it is an ellipse. A conic section is a circle if δ>0 and A1 = A2, it is an rectangular hyperbola if δ<0 and A1 = -A2. It can be proven that in the complex projective plane CP2 two conic sections have four points in common (if one accounts for multiplicity), so there are never more than 4 intersection points and there is always 1 intersection point (possibilities: 4 distinct intersection points, 2 singular intersection points and 1 double intersection points, 2 double intersection points, 1 singular intersection point and 1 with multiplicity 3, 1 intersection point with multiplicity 4). If there exists at least one intersection point with multiplicity > 1, then the two conic sections are said to be tangent. If there is only one intersection point, which has multiplicity 4, the two conic sections are said to be osculating.
Furthermore each straight line intersects each conic section twice. If the intersection point is double, the line is said to be tangent and it is called the tangent line. Because every straight line intersects a conic section twice, each conic section has two points at infinity (the intersection points with the line at infinity). If these points are real, the conic section must be a hyperbola, if they are imaginary conjugated, the conic section must be an ellipse, if the conic section has one double point at infinity it is a parabola. If the points at infinity are (1,i,0) and (1,-i,0), the conic section is a circle. If a conic section has one real and one imaginary point at infinity or it has two imaginary points that are not conjugated it is neither a parabola nor an ellipse nor a hyperbola.
Polar coordinates
In polar coordinates, a conic section with one focus at the origin and, if any, the other on the x-axis, is given by the equation
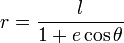 ,
,
where  is the eccentricity and
is the eccentricity and  is the semi-latus rectum (see below).
is the semi-latus rectum (see below).
As above,
- for
 , we have a circle,
, we have a circle, - for
 we obtain an ellipse,
we obtain an ellipse, - for
 a parabola,
a parabola, - and for
 a hyperbola.
a hyperbola.
Parameters
Various parameters can be associated with a conic section.
| conic section | equation | eccentricity (e) | linear eccentricity (c) | semi-latus rectum (l) | focal parameter (p) |
|---|---|---|---|---|---|
| circle |  |
 |
|
 |
 |
| ellipse |  |
 |
 |
 |
 |
| parabola |  |
 |
 |
 |
 |
| hyperbola |  |
 |
 |
|
 |

For every conic section, there exist a fixed point F, a fixed line L and a non-negative number e such that the conic section consists of all points whose distance to F equals e times their distance to L. e is called the eccentricity of the conic section.
The linear eccentricity (c) is the distance between the centre and the focus (or one of the two foci).
The latus rectum (2l) is the chord parallel to the directrix and passing through the focus (or one of the two foci).
The semi-latus rectum (l) is half the latus rectum.
The focal parameter (p) is the distance from the focus (or one of the two foci) to the directrix.
The relation  holds.
holds.
Properties
Conic sections are always "smooth". More precisely, they never contain any inflection points. This is important for many applications, such as aerodynamics, where a smooth surface is required to ensure laminar flow and to prevent turbulence.
Applications
Conic sections are important in astronomy: the orbits of two massive objects that interact according to Newton's law of universal gravitation are conic sections if their common centre of mass is considered to be at rest. If they are bound together, they will both trace out ellipses; if they are moving apart, they will both follow parabolas or hyperbolas. See two-body problem.
In projective geometry, the conic sections in the projective plane are equivalent to each other up to projective transformations.
For specific applications of each type of conic section, see the articles circle, ellipse, parabola, and hyperbola.
Intersecting two conics
The solutions to a two second degree equations system in two variables may be seen as the coordinates of the intersections of two generic conic sections. In particular two conics may possess none, two, four possibly coincident intersection points. The best method to locate these solutions is to exploits the homogeneous matrix representation of conic sections, i.e. a 3x3 symmetric matrix which depends on six parameters.
The procedure to locate the intersection points follows these steps:
- given the two conics
 and
and  consider the pencil of conics given by their linear combination
consider the pencil of conics given by their linear combination 
- identify the homogeneous parameters
 which corresponds to the degenerate conic of the pencil. This can be done by imposing that
which corresponds to the degenerate conic of the pencil. This can be done by imposing that  , which turns out to be the solution to a third degree equation.
, which turns out to be the solution to a third degree equation. - given the degenerate cone
 , identify the two, possibly coincident, lines constituting it
, identify the two, possibly coincident, lines constituting it - intersects each identified line with one of the two original conic; this step can be done efficiently using the dual conic representation of
- the points of intersection will represent the solution to the initial equation system
Dandelin spheres
See Dandelin spheres for a short elementary argument showing that the characterization of these curves as intersections of a plane with a cone is equivalent to the characterization in terms of foci, or of a focus and a directrix.