
Angular velocity
Background Information
SOS believes education gives a better chance in life to children in the developing world too. SOS Children has looked after children in Africa for forty years. Can you help their work in Africa?
- Do not confuse with angular frequency

In physics, the angular velocity is a vector quantity (more precisely, a pseudovector) which specifies the angular speed at which an object is rotating along with the direction in which it is rotating. The SI unit of angular velocity is radians per second, although it may be measured in other units such as degrees per second, degrees per hour, etc. When measured in cycles or rotations per unit time (e.g. revolutions per minute), it is often called the rotational velocity and its magnitude the rotational speed. Angular velocity is usually represented by the symbol omega (Ω or ω). The direction of the angular velocity vector is perpendicular to the plane of rotation, in a direction which is usually specified by the right hand rule.
The angular velocity of a particle
Two dimensions

The angular velocity of a particle in a 2-dimensional plane is the easiest to understand. As shown in the figure on the right (typically expressing the angular measures φ and θ in radians), if we draw a line from the origin (O) to the particle (P), then the velocity vector ( ) of the particle will have a component along the radius (
) of the particle will have a component along the radius ( - the radial component) and a component perpendicular to the radius (
- the radial component) and a component perpendicular to the radius ( - the tangential component).
- the tangential component).
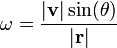
A radial motion produces no rotation of the particle (relative to the origin), so for purposes of finding the angular velocity the parallel (radial) component can be ignored. Therefore, the rotation is completely produced by the tangential motion (like that of a particle moving along a circumference), and the angular velocity is completely determined by the perpendicular (tangential) component.
It can be seen that the rate of change of the angular position of the particle is related to the tangential velocity by:

Utilizing θ, the angle between vectors and v, or equivalently as the angle between vectors r and v, gives:

Combining the above two equations and defining the angular velocity as ω=dφ/dt yields:
In two dimensions the angular velocity is a single number which has no direction. A single number which has no direction is either a scalar or a pseudoscalar, the difference being that a scalar does not change its sign when the x and y axes are exchanged (or inverted), while a pseudoscalar does. The angle as well as the angular velocity is a pseudoscalar. The positive direction of rotation is taken, by convention, to be in the direction towards the y axis from the x axis. If the axes are inverted, but the sense of a rotation does not, then the sign of the angle of rotation, and therefore the angular velocity as well, will change.
It is important to note that the pseudoscalar angular velocity of a particle depends upon the choice of the origin and upon the orientation of the coordinate axes.
Three dimensions
In three dimensions, the angular velocity becomes a bit more complicated. The angular velocity in this case is generally thought of as a vector, or more precisely, a pseudovector. It now has not only a magnitude, but a direction as well. The magnitude is the angular speed, and the direction describes the axis of rotation. The right hand rule indicates the positive direction of the angular velocity pseudovector, namely:
- If you curl the fingers of your right hand to follow the direction of the rotation, then the direction of the angular velocity vector is indicated by your right thumb.
Just as in the two dimensional case, a particle will have a component of its velocity along the radius from the origin to the particle, and another component perpendicular to that radius. The combination of the origin point and the perpendicular component of the velocity defines a plane of rotation in which the behaviour of the particle (for that instant) appears just as it does in the two dimensional case. The axis of rotation is then a line perpendicular to this plane, and this axis defined the direction of the angular velocity pseudovector, while the magnitude is the same as the pseudoscalar value found in the 2-dimensional case. Define a unit vector  which points in the direction of the angular velocity pseudovector. The angular velocity may be written in a manner similar to that for two dimensions:
which points in the direction of the angular velocity pseudovector. The angular velocity may be written in a manner similar to that for two dimensions:
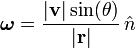
which, by the definition of the cross product, can be written:

Higher dimensions
In general, the angular velocity in an n-dimensional space is the time derivative of the angular displacement tensor which is a second rank skew-symmetric tensor. This tensor will have n(n-1)/2 independent components and this number is the dimension of the Lie algebra of the Lie group of rotations of an n-dimensional inner product space. It turns out that in three dimensional space angular velocity can be represented by vector because number of independent components is equal to number of dimensions of space.
Angular velocity of a rigid body

In order to deal with the motion of a rigid body, it is best to consider a coordinate system that is fixed with respect to the rigid body, and to study the coordinate transformations between this coordinate and the fixed "laboratory" system. As shown in the figure on the right, the lab system's origin is at point O, the rigid body system origin is at O' and the vector from O to O' is R. A particle (i) in the rigid body is located at point P and the vector position of this particle is Ri in the lab frame, and at position ri in the body frame. It is seen that the position of the particle can be written:

The defining characteristic of a rigid body is that the distance between any two points in a rigid body is unchanging in time. This means that the length of the vector  is unchanging. By Euler's rotation theorem, we may replace the vector with
is unchanging. By Euler's rotation theorem, we may replace the vector with  where
where  is a rotation matrix and
is a rotation matrix and  is the position of the particle at some fixed point in time, say t=0. This replacement is useful, because now it is only the rotation matrix which is changing in time and not the reference vector , as the rigid body rotates about point O'. The position of the particle is now written as:
is the position of the particle at some fixed point in time, say t=0. This replacement is useful, because now it is only the rotation matrix which is changing in time and not the reference vector , as the rigid body rotates about point O'. The position of the particle is now written as:

Taking the time derivative yields the velocity of the particle:
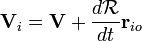
where Vi is the velocity of the particle (in the lab frame) and V is the velocity of O' (the origin of the rigid body frame). Since is a rotation matrix its inverse its its transpose. So we substitute  :
:
Continue by taking the time derivitve of  :
:

Applying the formula (AB)T = BTAT:
 is the negative of its transpose. Therefore it is a skew symmetric 3x3 matrix. We can therefore take its dual to get a 3 dimensional vector. is called the angular velocity tensor. If we take the dual of this tensor, matrix multiplication is replaced by the cross product. Its dual is called the angular velocity pseudovector, ω.
is the negative of its transpose. Therefore it is a skew symmetric 3x3 matrix. We can therefore take its dual to get a 3 dimensional vector. is called the angular velocity tensor. If we take the dual of this tensor, matrix multiplication is replaced by the cross product. Its dual is called the angular velocity pseudovector, ω.
![\boldsymbol\omega=[\omega_x,\omega_y,\omega_z]](../../images/147/14774.png)
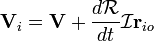
Substituting ω into the above velocity expression:

It can be seen that the velocity of a point in a rigid body can be divided into two terms - the velocity of a reference point fixed in the rigid body plus the cross product term involving the angular velocity of the particle with respect to the reference point. This angular velocity is the "spin" angular velocity of the rigid body as opposed to the angular velocity of the reference point O' about the origin O.
It is an important point that the spin angular velocity of every particle in the rigid body is the same, and that the spin angular velocity is independent of the choice of the origin of the rigid body system or of the lab system. In other words, it is a physically real quantity which is a property of the rigid body, independent of one's choice of coordinate system. The angular velocity of the reference point about the origin of the lab frame will, however, depend on these choices of coordinate system. It is often convenient to choose the centre of mass of the rigid body as the origin of the rigid body system, since a considerable mathematical simplification occurs in the expression for the angular momentum of the rigid body.