
Phoenix (spacecraft)
About this schools Wikipedia selection
SOS Children volunteers helped choose articles and made other curriculum material Visit the SOS Children website at http://www.soschildren.org/
 Artist's impression of the Phoenix spacecraft as it lands on Mars |
|
| Operator | NASA |
|---|---|
| Major contractors | Lockheed Martin |
| Mission type | Lander |
| Launch date | August 4 2007 |
| Launch vehicle | Delta II 7925 |
| Mission duration | 90 sols, 92.46 days |
| Orbital decay | May 25, 2008 (soft landing on Mars) |
| COSPAR ID | 2007-034A |
| Homepage | http://phoenix.lpl.arizona.edu/ |
| Mass | 350 kg |
Phoenix is a robotic spacecraft on a space exploration mission on Mars under the Mars Scout Program. The scientists conducting the mission are using instruments aboard the Phoenix lander to search for environments suitable for microbial life on Mars, and to research the history of water there. The multi-agency program is headed by the Lunar and Planetary Laboratory at the University of Arizona, under the direction of NASA's Jet Propulsion Laboratory. The program is a partnership of universities in the United States, Canada, Switzerland, Denmark, Germany, the United Kingdom, NASA, the Canadian Space Agency, the Finnish Meteorological Institute, Lockheed Martin Space Systems, MacDonald Dettwiler & Associates (MDA) and other aerospace companies.
Phoenix is the sixth successful landing on Mars, out of twelve total attempts (seven of which were American). It is the most recent spacecraft to land successfully on Mars. It is also the first successful landing on a polar region of Mars.
Program overview

The mission has two goals. One is to study the geologic history of water, the key to unlocking the story of past climate change. The second is to search for evidence of a habitable zone that may exist in the ice-soil boundary, the "biological paydirt." Phoenix's instruments are suitable for uncovering information on the geological and possibly biological history of the Martian Arctic. Phoenix will be the first mission to return data from either of the poles, and will contribute to NASA's main strategy for Mars exploration, "Follow the water."
The primary mission is anticipated to last 90 sols (Martian days) – just over 92 Earth days. Researchers are hoping that the lander will survive into the Martian winter so that it can witness polar ice developing at the spacecraft's exploration area. As much as three feet of solid carbon dioxide ice could appear in the area. Even if it does survive part way into the winter, it is very unlikely that the lander will function throughout the entire winter due to the intense cold. The mission was chosen to be a fixed lander rather than a rover because:
- costs were reduced through reuse of earlier equipment;
- the area of Mars where Phoenix is landing is thought to be relatively uniform and thus traveling is of less value; and
- the equipment weight that would be required to allow Phoenix to travel can instead be dedicated to more and better scientific instruments.
The 2003-2004 observations of methane gas on Mars were made remotely by three teams working with separate data. If the methane is truly present in the atmosphere of Mars, then something must be producing it on the planet now, because the gas is broken down by sunlight within 300 years, therefore the importance to search for biological potential or habitability of the Martian arctic's soils. Methane could also be the product of a geochemical process or the result of volcanic or hydrothermal activity. Other future missions may enable us to discover whether life does indeed exist on Mars today.
History of the program


While the proposal for Phoenix was being written, the Mars Odyssey Orbiter used its gamma ray spectrometer and found the distinctive signature of hydrogen on some martian surface. The only plausible source of hydrogen would be water in the form of ice, frozen below the surface of Mars. The mission was funded on the expectation that Phoenix would find water ice on the arctic plains of Mars. In August 2003 NASA selected the University of Arizona "Phoenix" mission for launch in 2007. It was hoped this would be the first in a new line of smaller, low-cost, Scout missions in the agency's exploration of Mars program. The selection was the result of an intense two-year competition with proposals from other institutions. The $325 million NASA award is more than six times larger than any other single research grant in University of Arizona history.
Peter H. Smith of the University of Arizona Lunar and Planetary Laboratory, as Principal Investigator, along with 24 Co-Investigators, were selected to lead the mission. The mission was named after the Phoenix, a mythological bird that is repeatedly reborn from its own ashes. The Phoenix spacecraft contains several previously built components. The lander used for the 2007–08 mission is the modified Mars Surveyor 2001 Lander (canceled in 2000), along with several of the instruments from both that and the previous unsuccessful Mars Polar Lander mission. Lockheed Martin, which built the lander, had kept the nearly complete lander in an environmentally controlled clean room from 2001 until the mission was funded by the NASA Scout Program.
Phoenix is a partnership of universities, NASA centers, and the aerospace industry. The science instruments and operations will be a University of Arizona responsibility. NASA's Jet Propulsion Laboratory in Pasadena, California, will manage the project and provide mission design and control. Lockheed Martin Space Systems, Denver, Colorado, built and tested the spacecraft. The Canadian Space Agency will provide a meteorological station, including an innovative Laser-based atmospheric sensor. The co-investigator institutions include Malin Space Science Systems (California), Max Planck Institute for Solar System Research (Germany), NASA Ames Research Centre (California), NASA Johnson Space Centre (Texas), MDA (Canada), Optech Incorporated (Canada), SETI Institute, Texas A&M University, Tufts University, University of Colorado, University of Copenhagen (Denmark), University of Michigan, University of Neuchâtel (Switzerland), University of Texas at Dallas, University of Washington, Washington University in St. Louis, and York University (Canada). Scientists from Imperial College London and Bristol University have provided hardware for the mission and will be part of the team operating the microscope station.
On June 2, 2005, following a critical review of the project's planning progress and preliminary design, NASA approved the mission to proceed as planned. The purpose of the review was to confirm NASA's confidence in the mission.
Launch


Phoenix was launched on 4 August 2007, at 5:26:34 a.m. EDT (09:26:34 UTC) on a Delta 7925 launch vehicle from Pad 17-A of the Cape Canaveral Air Force Station. The launch was nominal with no significant anomalies. The Phoenix lander was placed on a trajectory of such precision that its first trajectory course correction burn, performed on 10 August, 2007 at 7:30 a.m. EDT (11:30 UTC), was only 18 m/s. The launch took place during a launch window extending from 3 August 2007 to 24 August 2007. Due to the small launch window the rescheduled launch of the Dawn mission (originally planned for 7 July) had to stand down and was launched after Phoenix in September. The Delta 7925 was chosen due to its successful launch history, which includes launches of the Spirit and Opportunity Mars Exploration Rovers in 2003 and Mars Pathfinder in 1996.
A noctilucent cloud was created by the exhaust gas from the Delta II 7925 rocket used to launch Phoenix. The cloud took on not only the appearance of the mythical phoenix bird, but also the red and blue colors of the Phoenix Mars Lander logo. The colors in the cloud formed from the prism-like effect of the ice particles present in the exhaust trail.

Landing
The Jet Propulsion Laboratory made adjustments to the orbits of three satellites around Mars to be in the right place on May 25, 2008 to observe Phoenix as it entered the atmosphere and to monitor it up to one minute after landing. This information will allow for better design for future landers. The projected landing area was an ellipse 100 km by 20 km covering terrain which has been informally named " Green Valley" and may contain the largest concentration of water ice outside of the poles.
Phoenix entered the Martian atmosphere at nearly 21,000 km (13,000 miles) per hour, and within 7 minutes had to be able to decrease its speed to 8 km (5 miles) per hour before touching down on the surface. Confirmation of atmospheric entry was received at 4:46 p.m. PDT (23:46 UTC). Radio signals received at 4:53:44 p.m. PDT confirmed that Phoenix had survived its difficult descent and landed 15 minutes earlier, thus completing a 680 million km (422 million mile) flight from Earth.
Parachute deployment was about 7 seconds later than expected, leading to a landing position some 25–28 km long (east), near the edge of the predicted 99% landing ellipse. The reason for this delay is not yet publicly known.
Mars Reconnaissance Orbiter's High Resolution Imaging Science Experiment (HiRISE) camera photographed Phoenix suspended from its parachute during its descent through the Martian atmosphere. This marks the first time ever one spacecraft has photographed another in the act of landing on a planet (the Moon not being a planet, but a satellite). The same camera also imaged Phoenix on the surface with enough resolution to distinguish the lander and its two solar cell arrays. Ground controllers used Doppler tracking data from Odyssey and Mars Reconnaissance Orbiter to determine the lander's precise location as 68.218830°N 234.250778°E. The landing site is here on the Google Mars web-based map and here on the NASA World Wind planetary viewer (free installation required; "MOLA Colour (ASU)" is the Google image).


Phoenix landed in the Green Valley of Vastitas Borealis on May 25, 2008, in the late Martian northern hemisphere spring ( Ls = 76.73), where the Sun will shine on its solar panels the whole Martian day. By the Martian northern Summer solstice ( 2008-06-25), the Sun will appear at its maximum elevation of 47.0 degrees. Phoenix will experience its first sunset at the start of September 2008.
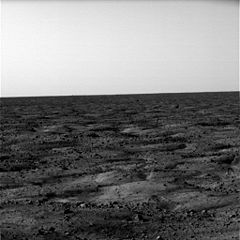
The landing was made on a flat surface, with the lander reporting only 0.3 degrees of tilt. Just before landing, the craft used its thrusters to orient its solar panels along an east-west axis to maximize power generation. The lander waited 15 minutes before opening its solar panels, to allow dust to settle. The first images from the lander became available around 7:00 p.m. PDT ( 2008-05-26 02:00 UTC). The images show a surface strewn with pebbles and incised with small troughs into polygons about 5 m across and 10 cm high, with the expected absence of large rocks and hills.
Like the 1970s era Viking spacecraft, Phoenix used rocket motors for its final descent. Experiments conducted by Nilton Renno, mission co-investigator from the University of Michigan, and his students have investigated how much surface dust would be kicked up on landing. Researchers at Tufts University, led by co-investigator Sam Kounaves, will be conducting additional in depth experiments to identify the extent of the ammonia contamination from the hydrazine propellant and its possible effects on the chemistry experiments. In 2007, a report to the American Astronomical Society by Washington State University professor Dirk Schulze-Makuch, suggested that Mars might harbour peroxide- based life forms which the Viking landers failed to detect because of the unexpected chemistry. The hypothesis was proposed long after any modifications to Phoenix could be made. One of the Phoenix mission investigators, NASA astrobiologist Chris McKay, stated that the report "piqued his interest" and that ways to test the hypothesis with Phoenix's instruments would be sought.
Surface mission
Communications from the surface

The robotic arm's first movement was delayed by one day when, on May 27, 2008, commands from Earth were not relayed to the Phoenix lander on Mars. The commands went to NASA's Mars Reconnaissance Orbiter as planned, but the orbiter's Electra UHF radio system for relaying commands to Phoenix temporarily shut off. Without new commands, the lander instead carried out a set of activity commands sent May 26 as a backup. On May 27 the Mars Reconnaissance Orbiter relayed images and other information from those activities back to Earth.
"Phoenix is in perfect health," JPL's Barry Goldstein, Phoenix project manager, said Wednesday morning, May 28, 2008.
Scientists leading NASA's Phoenix Mars mission from the University of Arizona in Tucson sent commands to unstow its robotic arm and take more images of its landing site on May 28.
"We appear to have landed where we have access to digging down a polygon trough the long way, digging across the trough, and digging into the centre of a polygon. We've dedicated this polygon as the first national park system on Mars -- a "keep out" zone until we figure out how best to use this natural Martian resource", Imager co-investigator Mark Lemmon of Texas A&M University said.
The robotic arm was a critical part of the Phoenix Mars mission. It was needed to trench into the icy layers of northern polar Mars and deliver samples to instruments that would analyze what Mars is made of, what its water is like, and whether it is or has ever been a possible habitat for life.
Robotic arm manager Bob Bonitz of NASA's Jet Propulsion Laboratory, Pasadena, Calif., explained how the arm was to be unstowed on May 28. "It's a series of seven moves, beginning with rotating the wrist to release the forearm from its launch restraint. Another series of moves releases the elbow from its launch restraints and moves the elbow from underneath the biobarrier."
The polygonal cracking in this area had previously been observed from orbit, and is similar to patterns seen in permafrost areas in polar and high altitude regions of Earth. A likely formation mechanism is that permafrost ice contracts when the temperature decreases, creating a polygonal pattern of cracks, which are then filled by loose soil falling in from above. When the temperature increases and the ice expands back to its former volume, it thus cannot assume its former shape, but is forced to buckle upwards. (On Earth, liquid water would probably enter at times along with soil, creating additional disruption due to ice wedging when the contents of the cracks freeze.)
The Lander's Robotic Arm touched soil on the red planet for the first time on May 31, 2008. It scooped dirt and started sampling the Martian soil for ice. The robotic arm started digging after days of testing. Phoenix's Robotic Arm Camera took an image underneath the lander on sol 5 (see below) that shows patches of smooth bright surface uncovered when thruster exhaust blew off overlying loose soil. It is speculated that this may be ice. Ray Arvidson of Washington University in St. Louis said: "We could very well be seeing rock, or we could be seeing exposed ice in the retrorocket blast zone."
Possible presence of shallow subsurface water ice
On June 19, 2008, NASA announced that dice-sized clumps of bright material in the "Dodo-Goldilocks" trench dug by the robotic arm had vanished over the course of four days, suggesting that they were composed of water ice which sublimated following exposure (see images below). While dry ice also sublimates, under the conditions present it would do so at a rate much faster than observed.
Wet Chemistry
On June 24, 2008, NASA's scientists launched a major series of tests. The robotic arm scooped up more soil and delivered it to 3 different on-board analyzers: an oven that baked it and tested the emitted gases, a microscopic imager, and a wet chemistry lab. The lander's Robotic Arm scoop was positioned over the Wet Chemistry Lab delivery funnel on Sol 29 (the 29th Martian day after landing, i.e. June 24 2008). The soil was transferred to the instrument on Sol 30 ( June 25, 2008), and Phoenix performed the first wet chemistry tests. On Sol 31 ( June 26, 2008) Phoenix returned the wet chemistry test results with information on the salts in the soil, and its acidity. The wet chemistry lab is part of the suite of tools called the Microscopy, Electrochemistry and Conductivity Analyzer (MECA).
Preliminary wet chemistry lab results showed the surface soil is moderately alkaline, between pH 8 and 9. Magnesium, sodium, potassium and chloride ions were found; the overall level of salinity is modest. Chloride levels were low, and thus the bulk of the anions present were not initially identified. The pH and salinity level were viewed as benign from the standpoint of biology. TEGA analysis of its first soil sample indicated the presence of bound water and CO2 that were released during the final (highest-temperature, 1,000ºC) heating cycle.
-

The first two trenches dug by Phoenix in Martian soil. The trench on the right, informally called "Baby Bear", is the source of the first samples delivered to TEGA and the optical microscope for analysis.
-

Dice-sized clumps of bright material in the enlarged "Dodo-Goldilocks" trench vanished over the course of four days, implying that they were composed of ice which sublimated following exposure.
-

Colour versions of the photos showing ice sublimation, with the lower left corner of the trench enlarged in the insets in the upper right of the images.



-

Phoenix footpad image, taken over 15 minutes after landing to ensure any dust stirred up had settled.
-

One of the first surface images from Phoenix.
-

View underneath lander towards south foot pad, showing patchy exposures of a bright surface, possibly ice.




A 360-degree panorama assembled from images taken on sols 1 and 3 after landing. The upper portion has been vertically stretched by a factor of 8 to bring out details. Visible near the horizon at full resolution are the backshell and parachute (a bright speck above the right edge of the left solar array, about 300 m distant) and the heat shield and its bounce mark (two end-to-end dark streaks above the centre of the left solar array, about 150 m distant); on the horizon, left of the weather mast, is a crater. (Scroll right if you do not initially see them.)
-
Comparison between polygons photographed by Phoenix on Mars...
-
... and as photographed (in false colour) from Mars orbit...



Hardware Overview
Lander systems include a RAD6000 based computer system for commanding the spacecraft and handling data, and a digital telecommunications system that can communicate directly with Earth or via Mars Odyssey, Mars Reconnaissance Orbiter, or Mars Express, all now using turbo codes for error correction. The interconnections use the Proximity-1 protocol.
Other parts of the lander are an electrical system containing solar arrays and batteries, a guidance system to land the spacecraft, eight 1.0 lbf (4.4 N) and 5.0 lbf (22 N) monopropellant hydrazine engines built by Aerojet-Redmond Operations for the cruise phase, twelve 68.0 lbf (302 N) Aerojet monopropellant hydrazine thrusters to land the Phoenix, mechanical and structural elements, and a thermo-control system to ensure the spacecraft does not get too cold.
The lander has a mass of 350 kg, and measures 2.2 m tall by 5.5 m long with its solar panels deployed. The science deck is about 1.5 m in diameter.
Scientific payload

Phoenix carries improved versions of University of Arizona panoramic cameras and volatiles-analysis instrument from the ill-fated Mars Polar Lander, as well as experiments that had been built for the canceled Mars Surveyor 2001 Lander, including a JPL trench-digging robot arm, a set of wet chemistry laboratories, and optical and atomic force microscopes. The science payload also includes a descent imager and a suite of meteorological instruments.
Robotic arm and camera

The Robotic Arm (RA) is designed to extend 2.35 m from its base on the lander, and have the ability to dig down to 0.5 m below the surface. It will take samples of dirt and ice that will be analyzed by other instruments on the lander. The arm was designed and built for the Jet Propulsion Laboratory by Alliance Spacesystems, LLC (a subsidiary of MacDonald Dettwiler & Associates (MDA)) in Pasadena, California. Commands were sent for the arm to be deployed on May 28, 2008, beginning with the pushing aside of a protective covering intended to serve as a redundant precaution against potential contamination of Martian subsoil by Earthly lifeforms. The Robotic Arm Camera (RAC) attached to the Robotic Arm just above the scoop is able to take full-colour pictures of the area, as well as verify the samples that the scoop will return, and examine the grains of the area where the Robotic Arm has just dug. The camera was made by the University of Arizona and Max Planck Institute for Solar System Research, Germany.

Surface stereo imager
The Surface Stereo Imager (SSI) is the primary camera on the spacecraft. It is a stereo camera that is described as "a higher resolution upgrade of the imager used for Mars Pathfinder and the Mars Polar Lander". It is expected to take many stereo images of the Martian Arctic. It will also be able, using the Sun as a reference, to measure the atmospheric distortion of the Martian atmosphere due to dust, air and other features. The camera was provided by the University of Arizona in collaboration with the Max Planck Institute for Solar System Research.
Thermal and evolved gas analyzer

The Thermal and Evolved Gas Analyzer (TEGA) is a combination of a high-temperature furnace with a mass spectrometer. It will be used to bake samples of Martian dust, and determine the content of this dust. It has eight ovens, each about the size of a large ball-point pen, which will be able to analyze one sample each, for a total of eight separate samples. Team members can measure how much water vapor and carbon dioxide gas are given off, how much water ice the samples contain, and what minerals are present that may have formed during a wetter, warmer past climate. The instrument will also be capable of measuring any organic volatiles, such as methane, down to 10 ppb. TEGA was built by the University of Arizona and University of Texas at Dallas.
On May 29, 2008, electrical tests indicated an intermittent short circuit in TEGA . Specifically, the glitch is in one of the two filaments responsible for ionizing volatiles. NASA worked around the problem by configuring the backup filament as the primary and vice-versa.
On June 11 the first of the eight ovens was filled with the a soil sample after several tries to get the soil sample through the screen of TEGA. On June 17, it was announced that no water was found in this sample; however, since it had been exposed to the atmosphere for several days prior to entering the oven, any initial water ice it might have contained could have been lost via sublimation.
Mars Descent Imager

The Mars Descent Imager ("MARDI") was intended to take pictures of the landing site during the last three minutes of descent. As originally planned, it would have begun taking pictures after the aeroshell departed, about 8 km above the Martian soil.
Before launch, testing of the assembled spacecraft uncovered a potential data corruption problem with an interface card that was designed to route MARDI image data as well as data from various other parts of the spacecraft. The potential problem could occur if the interface card were to receive a MARDI picture during a critical phase of the spacecraft's final descent, at which point data from the spacecraft's Inertial Measurement Unit could have been lost; this data was critical to controlling the descent and landing. This was judged to be an unacceptable risk, and it was decided to not use MARDI during the mission. As the flaw was discovered too late for repairs, the camera remains installed on Phoenix; it was not used to take pictures, nor was its built-in microphone used.
After launch, an alternative plan was developed for MARDI to capture a single image during descent; but it was determined that this would have required changes to the timing of events during descent, so the alternative plan was also discarded, in favour of reducing risk.
MARDI images had been intended to help pinpoint exactly where the lander has landed, and possibly help find potential science targets. It was also to be used to learn if the area where the lander lands is typical of the surrounding terrain. MARDI was built by Malin Space Science Systems.
MARDI is the lightest and most efficient camera ever to land on Mars. It would have used only 3 watts of power during the imaging process, less than most other space cameras. It had originally been designed and built to perform the same function on the Mars Surveyor 2001 Lander mission; after that mission was canceled, MARDI spent several years in storage until it was deployed on the Phoenix lander.
Microscopy, electrochemistry, and conductivity analyzer

The Microscopy, Electrochemistry, and Conductivity Analyzer (MECA) is an instrument package originally designed for the canceled Mars Surveyor 2001 Lander mission. It consists of a wet chemistry lab (WCL), optical and atomic force microscope, and a thermal and electrical conductivity probe. The Jet Propulsion Laboratory built MECA. A Swiss consortium led by the University of Neuchatel contributed the atomic force microscope.
Using MECA, researchers will examine soil particles as small as 16 μm across; additionally, they will determine the chemical composition of water soluble ions in the soil. They will measure electrical and thermal conductivity of soil particles using a probe on the robotic arm scoop.
Optical microscope
The optical microscope is capable of making images of the Martian regolith with a resolution of 256 pixels/mm or 16 microns/pixel. The field of view of the microscope is a 2x2 mm sample holder to which the robotic arm delivers the sample. The sample is illuminated either by 9 red, green and blue LEDs or by 3 LEDs emitting ultraviolet light. The electronics for the readout of the CCD chip are shared with the robotic arm camera which has an identical CCD chip. The University of Arizona designed the optical microscope.
Atomic force microscope
The atomic force microscope has access to a small area of the sample delivered to the optical microscope. The instrument scans over the sample with one of 8 silicon crystal tips and measures the repulsion of the tip from the sample. The maximum resolution will be 0.1 microns. It was designed by the University of Neuchatel.
Wet chemistry lab

Tufts University developed reagents and sensors for the wet chemistry lab. Imperial College London provided the microscope sample substrates.
The robotic arm will scoop up some soil, put it in one of four wet chemistry lab cells, where water will be added, and while stirring, an array of electrochemical sensors will measure a dozen dissolved ions such as sodium, magnesium, calcium, and sulfate that have leached out from the soil into the water. This will provide information on the biological compatibility of the soil, both for possible indigenous microbes and for possible future Earth visitors. Sensors will also measure the pH and conductivity of the soil-water mixture, telling if the wet soil is super acidic or alkaline and salty, or full of oxidants that can destroy life.
Every wet chemistry cell has 26 chemical sensors and a temperature sensor. The polymer Ion Selective Electrodes are able to determine the concentration of ions by measuring the change of electric potential within the sensor, which is separated from the wet chemistry cell by an ion selective membrane. The two gas sensing electrodes for oxygen and carbon dioxide work on the same principle and are separated from the wet chemistry cell by a gas permeable membrane. A gold micro-electrode array is used for the Cyclic voltammetry and Anodic Stripping Voltammetry. Cyclovoltammetry is a method to study ions by applying a waveform of varying potential and measuring the current-voltage curve. Anodic Stripping Voltammetry first deposits the metals onto the gold electrode with an applied potential. After the potential is reversed the current is measured while the metals are stripped off the electrode.
The first measurement indicated that the surface layer contains water soluble salts and has a pH between 8 and 9.
Thermal and Electrical Conductivity Probe (TECP)
The MECA contains a Thermal and Electrical Conductivity Probe (TECP). TECP has four short fat probes and one port on the side of the housing that will make the following measurements:
- Martian Soil ( Regolith) temperature
- Humidity
- Thermal conductivity
- Electrical conductivity
- Dielectric permittivity
- Wind speed
- Atmospheric temperature
Three of the four probes have tiny heating elements and temperature sensors inside them. One probe uses internal heating elements to send out a pulse of heat, recording the time the pulse is sent and monitoring the rate at which the heat is dissipated away from the probe. Adjacent needles sense when the heat pulse arrives. The speed that the heat travels away from the probe as well as the speed that it travels between probes allows scientists to measure thermal conductivity specific heat (the ability of the regolith to conduct heat relative to its ability to store heat) and thermal diffusivity (the speed at which a thermal disturbance is propagated in the soil).
The probes will also measure the dialectric permittivity and electrical conductivity, which can be used to calculate moisture and salinity of the regolith.
Needles 1 and 2 work in conjunction to measure salts in the regolith, heat the soil to measure thermal properties (thermal conductivity, specific heat and thermal diffusivity) of the regolith, and measure soil temperature. Needles 3 and 4 measure liquid water in the regolith. Needle 4 is a reference thermometer for needles 1 and 2. Port 5 measures relative humidity.
Meteorological station
The Meteorological Station (MET) will record the daily weather during the course of the Phoenix mission. It is equipped with a wind indicator and pressure and temperature sensors. The MET also contains a LIDAR (light detection and ranging) device for sampling the number of dust particles in the air. It was designed in Canada and supported by the Canadian Space Agency. A team headed by York University will oversee the science operations of the station. The York University team includes contributions from the University of Alberta, University of Aarhus (Denmark), Dalhousie University, Finnish Meteorological Institute, Optech, and the Geological Survey of Canada. Canadarm maker MacDonald Dettwiler and Associates (MDA) of Richmond, B.C. built the MET.


The surface wind velocity, pressure and temperatures will also be monitored over the mission (from the tell-tale, pressure and temperature sensors) and show the evolution of the atmosphere with time. To measure dust and ice contribution to the atmosphere, a LIDAR is employed. The LIDAR collects information about the time-dependent structure of the planetary boundary layer by investigating the vertical distribution of dust, ice, fog and clouds in the local atmosphere.
There are three temperature sensors ( thermocouples) on a 1 m vertical mast (shown at left in it's stowed position) at heights of approximately 250, 500 and 1000mm above the lander deck. The sensors are referenced to a measurement of absolute temperature at the base of the mast. A pressure sensor built by Finnish Meteorological Institute is located in the Payload Electronics Box, which sits on the surface of the deck, and houses the acquisition electronics for the MET payload. The Pressure and Temperature sensors commenced operations on Sol 0 ( May 26, 2008), and operate continuously, sampling once every 2 seconds.
The Telltale is a joint Canadian, Danish instrument (right) which provides a course estimate of wind speed and direction. The speed is based on the amount of deflection from vertical that is observed, while the wind direction is provided by which way this deflection occurs. A mirror, located under the telltale, and a calibration "cross," above (as observed through the mirror) are employed to increase the accuracy of the measurement. Either the SSI or RAC cameras can make this measurement, though the former is typically used. Periodic observations both day and night aid in understanding the diurnal variability of wind at the Phoenix landing site.

The vertical pointing LIDAR detects multiple types of backscattering (for example Rayleigh scattering and Mie Scattering), with the delay between laser pulse generation and the return of light scattered by atmospheric particles determining the altitude at which scattering occurs. Additional information can be obtained from backscattered light at different wavelengths (colors), and the Phoenix system transmits both 532 nm and 1064 nm. Such wavelength dependence may make it possible to discriminate between ice and dust, and serve as an indicator of the effective particle size.

The Phoenix LIDAR laser is a passive Q-switched Nd:YAG laser with the dual wavelengths of 1064 nm and 532 nm. It operates at 100 Hz with a pulse width of 10 ns. The scattered light is received by two detectors that operate (green and IR) and the green signal is collected in both analog and photon counting modes.
The LIDAR was operated for the first time at noon on Sol 3 ( May 29, 2008), recording the first surface extraterrestrial atmospheric profile. This first profile indicated well mixed dust in the first few kilometers of the atmosphere, where the planetary boundary layer was observed by a marked decrease in scattering signal. The contour plot (right) shows the amount of dust as a function of time and altitude, with warmer colors (red-orange) indicating more dust, and cooler colors (blues-green), indicating less dust. There is also an instrumentation effect of the laser warming up, causing the appearance of dust increasing with time. A Layer at 3.5km can be observed in the plot, which could be extra dust, or less likely given the time of sol this was acquired, a low altitude ice cloud.
The image at left shows the LIDAR operating on Mars, with its telescope (large black tube); laser window (small tube in foreground); shrouded in its thermal blanket. The system with the cover closed is shown below in celebration of ( July 1, 2008), Canada Day. The pink hue is due to airborne dust collecting on the blanket.
The Phoenix DVD

Attached to the deck of the lander (next to the US flag) is the "Phoenix DVD", compiled by the Planetary Society. The disc contains Visions of Mars, a multimedia collection of literature and art about the Red Planet. Works include the text of H.G. Wells' War of the Worlds (and the radio broadcast by Orson Welles), Percival Lowell's Mars as the Abode of Life with a map of his proposed canals, Ray Bradbury's The Martian Chronicles, and Kim Stanley Robinson's Green Mars. There are also messages directly addressed to future Martian visitors or settlers from, among others, Carl Sagan and Arthur C. Clarke. In 2006, The Planetary Society collected a quarter million names submitted through the Internet and placed them on the disc, which claims, on the front, to be "the first library on Mars".
The Phoenix DVD is made of a special silica glass designed to withstand the Martian environment, lasting for hundreds (if not thousands) of years on the surface while it awaits discoverers.
The text just below the centre of the disk reads:
“This archive, provided to the NASA Phoenix mission by The Planetary Society, contains literature and art (Visions of Mars), greetings from Mars visionaries of our day, and names of 21st century Earthlings who wanted to send their names to Mars. This DVD-ROM is designed to be read on personal computers in 2007. Information is stored in a spiral groove on the disc. A laser beam can scan the groove when metallized or a microscope can be used. Very small bumps and holes represent the zeroes and ones of digital information. The groove is about 0.74 microns wide. For more information refer to the standards document ECMA-268 (80 mm DVD Read-Only Disk).”